PIC
割り込みと例外のチャプター では IDT の設定をすることで割り込みを受け取る準備をしました。 しかし、まだ外部割り込みに関する設定をしていないためそもそも割り込みが発生することがありません。 本チャプターでは PIC: Programmable Interrupt Controller の初期化・設定をおこないます。 これにより、タイマーやキーボード等の外部デバイスから割り込みを受け取ることができるようになります。
important
本チャプターの最終コードは whiz-ymir-pic ブランチにあります。
Table of Contents
Intel 8259 PIC
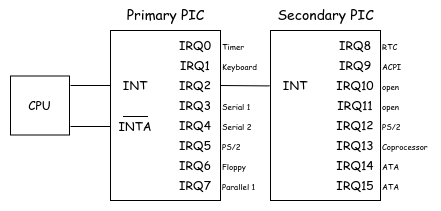
本シリーズで扱う PIC は Intel 8259A です。 最近の Intel CPU では 8259A 相当のコントローラが2つ搭載されているそうです。 それぞれ Master PIC と Slave PIC と呼ばれます。 本シリーズでは Primary PIC と Secondary PIC と呼びます。 それぞれが Interrupt Requested Line (IRQ) と呼ばれる入力線を8つずつ持ち、Secondary は Primary に対してカスケード接続されています。 なお、最近の CPU では 8259 PIC の代わりに APIC: Advanced Programmable Interrupt Controller が広く使われています。 PIC はチップとして搭載されることはほぼなくなったものの、8259A 相当の機能は southbridge が依然として提供してくれているようです。
 Functional Overview of 8259A PIC
Functional Overview of 8259A PIC
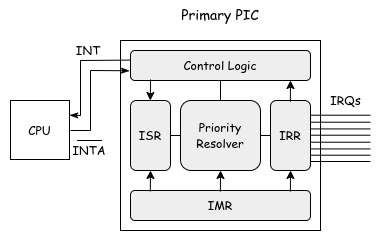
各PICの内部は以下の概念図のようになっています:
 Functional Overview of the Internal Structure of 8259A PIC
Functional Overview of the Internal Structure of 8259A PIC
IRR
IRR: Interrupt Request Register は PIC が受け取った割り込み要求を保持するレジスタです。 IRR が何らかの割り込み要求を保持している場合、PIC は CPU に対して INT 信号を送信し割り込みを要求します。 IRR は常に CPU から read 可能です。
ISR
ISR: In-Service Register は CPU によって処理が受け付けられた割り込み要求を保持するレジスタです。 CPU が割り込み要求を受理した場合、\( \overline{INTA} \) 信号を PIC に送ります1。 この信号を受け取ると、Priority Resolver が IRR の中から最も優先度の高い割り込み要求を選びます。 選んだ IRQ を ISR の対応するビットにセットし、IRR から対応するビットをクリアします。 優先度はデフォルトでは IRQ0 が最も高く、IRQ7 が最も低いです。 なお ISR にビットがセットされると、それ以下の優先度の IRQ は自動的にマスクされます。 ISR は常に CPU から read 可能です。
IMR
IMR: Interrupt Mask Register は PIC が受け取った割り込み要求をマスクするためのレジスタです。 IMR でセットされたビットに対応する IRR のビットは無視されます。
Command Words
8259A PIC は CW: Command Words という命令2を CPU から受け付けます。
CW には ICW: Initialization Command Words と OCW: Operation Command Words の2つがあります。
ICW は PIC を初期化するためのコマンドであり、OCW は初期化後に PIC を操作するためのコマンドです。
どちらも 1byte のデータを PIC に送信することで実行されます。
以降は CW に送信する 1byte のうち、N-th bit を D[N] と表記します。
ICW
ICW は PIC を初期化するためのコマンドです。 一度初期化シーケンスに入ると、続く CW は ICW として解釈されます。 以下の 4 つのコマンドシーケンスからなり、それぞれが設定項目を決定します。 一応(ほぼ)全ての設定項目を書いていますが、Ymir で利用するのはごく一部です。
ICW1
PIC を初期化モードにする。D[4] が 1 の場合、ICW1として解釈される。
以下の設定をする:
- ICW4 が必要かどうか
- シングルモードかカスケードモードか (PICが1つか2つか)
- レベルトリガかエッジトリガか
ICW2
ICW1 に続く CW は ICW2 として解釈される。
CPU に通知される割り込み番号と IRQ のオフセットを設定する。
ここに 0x20 を設定した場合、IRQ1 は割り込みベクタ 0x21、IRQ2 はベクタ 0x22... のように CPU から通知される。
ICW3
ICW2 に続く CW は ICW3 として解釈される。 Primary PIC に対して送信する場合は、各 IRQ が Secondary にカスケードされているかどうかをビットマップで設定する。 Secondary PIC に対して送信する場合は、カスケードされている Primary PIC の Cascade ID を設定する。
ICW4
ICW3 に続く CW は ICW4 として解釈される。 以下の設定をする:
- モード: 8086/8088 モードか MCS-80/85 モードか
- EOI: Auto-EOI か Normal EOI か (EOI については後述)
- バッファリングモード
- ネストモード
OCW
PIC の初期化後に PIC の状態を設定したりするコマンドを発行します。
OCW1
IMR を設定する。 IMR の各ビットは対応する IRQ をマスクする。
OCW2
以下のコマンドを実行する:
- EOI: 後述
- Rotate: 優先度回転する。低い優先度の IRQ から処理されるようにする
- Set: 優先度の設定をする
OCW3
基本的には IRR/ISR の値を読み出すために使われる。
PIC の初期化
以上の知識を踏まえて、PIC を初期化していきます。 x64 では Primary PIC と Secondary PIC のそれぞれに対して Command Port と Data Port が用意されています3。 各 I/O ポートは以下のとおりです:
const primary_command_port: u16 = 0x20;
const primary_data_port: u16 = primary_command_port + 1;
const secondary_command_port: u16 = 0xA0;
const secondary_data_port: u16 = secondary_command_port + 1;
まずは ICW を定義します:
const icw = enum { icw1, icw2, icw3, icw4 };
const Icw = union(icw) {
icw1: Icw1,
icw2: Icw2,
icw3: Icw3,
icw4: Icw4,
const Icw1 = packed struct(u8) {
/// ICW4 is needed.
icw4: bool = true,
/// Sigle or cascade mode.
single: bool = false,
/// CALL address interval 4 or 8.
interval4: bool = false,
/// Level triggered or edge triggered.
level: bool = false,
/// Initialization command.
_icw1: u1 = 1,
/// Unused in 8085 mode.
_unused: u3 = 0,
};
const Icw2 = packed struct(u8) {
/// Vector offset.
offset: u8,
};
const Icw3 = packed struct(u8) {
/// For primary PIC, IRQ that is cascaded.
/// For secondary PIC, cascade identity.
cascade_id: u8,
};
const Icw4 = packed struct(u8) {
/// 8086/8088 mode or MCS-80/85 mode.
mode_8086: bool = true,
/// Auto EOI or normal EOI.
auto_eoi: bool = false,
/// Buffered mode.
buf: u2 = 0,
/// Special fully nested mode.
full_nested: bool = false,
/// ReservedZ.
_reserved: u3 = 0,
};
};
Icw は Tagged Union です。
C の共用体のように、union は active なフィールドを常に1つ持ちます。
もしも active でないフィールドに対してアクセスした場合には、Debugビルドならランタイムエラーに、それ以外なら UD になります。
同様に OCW も定義します:
const ocw = enum { ocw1, ocw2, ocw3 };
const Ocw = union(ocw) {
ocw1: Ocw1,
ocw2: Ocw2,
ocw3: Ocw3,
const Ocw1 = packed struct(u8) {
/// Interrupt mask.
imr: u8,
};
const Ocw2 = packed struct(u8) {
/// Target IRQ.
level: u3 = 0,
/// ReservedZ.
_reserved: u2 = 0,
/// EOI
eoi: bool,
/// If set, specific EOI.
sl: bool,
/// Rotate priority.
rotate: bool = false,
};
const Ocw3 = packed struct(u8) {
/// Target register to read.
ris: Reg,
/// Read register command.
read: bool,
/// Unused in Ymir.
_unused1: u1 = 0,
/// Reserved 01.
_reserved1: u2 = 0b01,
/// Unused in Ymir.
_unused2: u2 = 0,
/// ReservedZ.
_reserved2: u1 = 0,
const Reg = enum(u1) { irr = 0, isr = 1 };
};
};
なお ICW でも OCW でも、ハードウェア的に固定値であるフィールドや Ymir で使わないフィールドはデフォルト値を設定しています。
続いて、これらの CW を PIC に対して発行するためのヘルパー関数を定義します:
const am = @import("asm.zig");
fn issue(cw: anytype, port: u16) void {
const T = @TypeOf(cw);
if (T != Icw and T != Ocw) {
@compileError("Unsupported type for pic.issue()");
}
switch (cw) {
inline else => |s| am.outb(@bitCast(s), port),
}
am.relax();
}
issue() は Icw か Ocw のみを受け付けることを保証しています。
union に対する switch は、active なフィールドに応じて処理を変更させることができます。
今回はどのフィールドに対しても同様に @bitCast() して OUTB を実行したいです。
そのため、inline else によって無条件に union の中身のフィールドを取り出しています。
この関数を使うと、PIC の初期化関数は簡単に書けます:
pub const primary_vector_offset: usize = 32;
pub const secondary_vector_offset: usize = primary_vector_offset + 8;
pub fn init() void {
am.cli();
defer am.sti();
// Start initialization sequence.
issue(Icw{ .icw1 = .{} }, primary_command_port);
issue(Icw{ .icw1 = .{} }, secondary_command_port);
// Set the vector offsets.
issue(Icw{ .icw2 = .{ .offset = primary_vector_offset } }, primary_data_port);
issue(Icw{ .icw2 = .{ .offset = secondary_vector_offset } }, secondary_data_port);
// Tell primary PIC that there is a slave PIC at IRQ2.
issue(Icw{ .icw3 = .{ .cascade_id = 0b100 } }, primary_data_port);
// Tell secondary PIC its cascade identity.
issue(Icw{ .icw3 = .{ .cascade_id = 2 } }, secondary_data_port);
// Set the mode.
issue(Icw{ .icw4 = .{} }, primary_data_port);
issue(Icw{ .icw4 = .{} }, secondary_data_port);
// Mask all IRQ lines.
setImr(0xFF, primary_data_port);
setImr(0xFF, secondary_data_port);
}
fn setImr(imr: u8, port: u16) void {
issue(Ocw{ .ocw1 = .{ .imr = imr } }, port);
}
今のところ IRQ 用の割り込みハンドラを用意していないため、IRQ から割り込みが発生すると割り込みハンドラとしてunhandledHandler() が呼び出されてしまいます。
これを避けるため、まず最初に割り込みを無効化しておきます。
無効化した割り込みは init() から戻るときに再び有効化したいです。
このような RAII パターンは、Zig では defer を使うことで実現できます。
コマンドは先ほど定義した Icw のうちデフォルト値がセットされていないものを設定しながら使っています。
ICW1 では ICW4 が必要であることを示しています。
ICW2 では IRQ と割り込みベクタのオフセットを設定しています。これについては後述します。
ICW3 では Primary/Secondary PIC の接続関係を設定しています。
8259A では IRQ2 に Secondary PIC が接続されているため、Primary PIC には 0b100 == 4 を指定しています。
ICW4 では Normal EOI を指定しています。EOI についても後述します。
Vector Offset
IRQ-N は、デフォルトで N 番目の割り込みベクタを発生させます。
Real Mode においてはこれで問題ないのですが、Protected Mode においてはベクタの 0 から 31 までは Intel が予約しています。
見事に衝突していますね。IBM さんやってしまいました。
仕方がないので、Linux を含むほとんどの OS は IRQ からの割り込みベクタを他のベクタに リマップ しています。
Ymir では、Primary PIC と Secondary PIC に対してそれぞれ 32 と 40 をオフセットとして設定しています。
これにより、IRQ-N は 32 + N 番目の割り込みベクタを発生させるようになります。
このオフセットの指定は ICW2 によって行います。
EOI
EOI: End of Interrupt は PIC に対してさらなる割り込みの送信を許可するための通知です。 EOI には以下の2つのモードがあり、ICW4 で設定できます:
- Automatic EOI: PIC が CPU に対して割り込みを通知し、CPU から最後の \( \overline{INTA} \) 信号を受け取ると自動的に EOI を受理したものとします。
- Normal EOI: CPU が明示的に EOI コマンドを送信します。
Ymir では Normal EOI を採用します。 Normal EOI では、通知の種類が2つあります:
- Specific EOI: 特定の IRQ に対して EOI を送信します。
- Non-Specific EOI: IRQ 番号を指定せず、最も優先度の高い IRQ が自動的に選択されます。
Ymir では Specific EOI を採用します。
Specific EOI は OCW2 によって送信されます。
この際、3bit の level フィールドで IRQ 番号を指定します。
指定した IRQ は ISR からクリアされます。
処理中の割り込みが Secondary PIC に属する IRQ8~IRQ15 である場合、EOI は Primary PIC と Secondary PIC の両方に送信する必要はあります。 Primary PIC に対しては Secondary がカスケードされた IRQ2 に対して EOI を送信します。
ヘルパーの実装
PIC の初期化はできました。 続いて、他のファイルから PIC を操作するためのヘルパー関数を実装します。
まずは IRQ に対応する enum を定義します:
pub const IrqLine = enum(u8) {
timer = 0,
keyboard = 1,
secondary = 2,
serial2 = 3,
serial1 = 4,
parallel23 = 5,
floppy = 6,
parallel1 = 7,
rtc = 8,
acpi = 9,
open1 = 10,
open2 = 11,
mouse = 12,
cop = 13,
primary_ata = 14,
secondary_ata = 15,
/// Return true if the IRQ belongs to the primary PIC.
pub fn isPrimary(self: IrqLine) bool {
return @intFromEnum(self) < 8;
}
/// Get the command port for this IRQ.
pub inline fn commandPort(self: IrqLine) u16 {
return if (self.isPrimary()) primary_command_port else secondary_command_port;
}
/// Get the data port for this IRQ.
pub inline fn dataPort(self: IrqLine) u16 {
return if (self.isPrimary()) primary_data_port else secondary_data_port;
}
/// Get the offset of the IRQ within the PIC.
pub fn delta(self: IrqLine) u3 {
return @intCast(if (self.isPrimary()) @intFromEnum(self) else (@intFromEnum(self) - 8));
}
};
IRQ 番号を扱う際には、Primary と Secondary を合わせた連番 (0-15) ではなく、
各 PIC における連番 (0-7) として扱いたいことが多々あります。
delta() は、Primary に対してはそのままの値を返し、Secondary に対しては 8 を引いた値を返します。
IrqLine を指定して対応する IMR (マスク)を設定する関数を定義します:
pub fn setMask(irq: IrqLine) void {
const port = irq.dataPort();
setImr(am.inb(port) | bits.tobit(u8, irq.delta()), port);
}
pub fn unsetMask(irq: IrqLine) void {
const port = irq.dataPort();
setImr(am.inb(port) & ~bits.tobit(u8, irq.delta()), port);
}
IMR は各 PIC がそれぞれ持っており、IRQ の 0-7 と 8-15 はそれぞれ分けて設定する必要があります。
先ほど用意したヘルパー関数を利用することで、Primary/Secondary 用のポート指定が簡単にできていますね。
最後に、指定した IrqLine に対して EOI を通知する関数を定義します:
pub fn notifyEoi(irq: IrqLine) void {
issue(
Ocw{ .ocw2 = .{ .eoi = true, .sl = true, .level = irq.delta() } },
irq.commandPort(),
);
if (!irq.isPrimary()) {
issue(
Ocw{ .ocw2 = .{ .eoi = true, .sl = true, .level = 2 } },
primary_command_port,
);
}
}
前述したように Secondary に対する EOI は Primary/Secondary の両方に送信する必要があります。
よって、先ほど用意した isPrimary() を使って分岐しています。
割り込みのアンマスク
kernelMain() から PIC の初期化を実行しましょう (arch.zig において pic.zig を export するのを忘れずに):
arch.pic.init();
log.info("Initialized PIC.", .{});
これで PIC の初期化が完了しました。 ただし、実行したところで前回までと何も変わりません。 なにせまだ全ての IRQ は IMR でマスクされてるため、どんな IRQ も割り込みを発生させません。 本チャプターの締めくくりとして、シリアルの割り込みを有効化してみます。
まず、シリアル用の割り込みハンドラを定義します。 とはいっても、Ymir 自体は入力を受け付けて処理するような機能は実装しません。 そのため、とりあえずログだけ出力したあと EOI を送信するだけの割り込みハンドラを用意します:
fn blobIrqHandler(ctx: *arch.intr.Context) void {
const vector: u16 = @intCast(ctx.vector - 0x20);
log.debug("IRQ: {d}", .{vector});
arch.pic.notifyEoi(@enumFromInt(vector));
}
割り込みと例外 で実装したように、割り込みハンドラは Context というコンテキスト情報を受けとります。
この中には割り込みベクタも入っています。
IRQ の番号を取得するには、割り込みベクタから ICW2 で設定したオフセットを引くだけです。
算出した IRQ の番号を出力したあと、notifyEoi() で EOI を送信します。
続いて、この割り込みハンドラを登録します。 そういえば割り込みハンドラを登録する関数を実装していなかったため、ここで実装しておきます:
pub fn registerHandler(comptime vector: u8, handler: Handler) void {
handlers[vector] = handler;
idt.setGate(
vector,
.Interrupt64,
isr.generateIsr(vector),
);
}
kernelMain() で割り込みハンドラを登録し、PIC にシリアルの割り込みマスクを外すように指示します:
arch.intr.registerHandler(idefs.pic_serial1, blobIrqHandler);
arch.pic.unsetMask(.serial1);
これで準備万端と思いきや、これでもまだ割り込みは発生しません。
シリアル自体に割り込みを発生させるように設定してあげる必要があります。
シリアルの IER: Interrupt Enable Register に対して 0b01 という値を書き込むことで、Rx-available または TX-available な状態になった時に割り込みを発生させることができます。
TX-available は、シリアル出力が完了し、出力バッファに新しいデータを書き込める状態になった場合に発生します。
Rx-available は、シリアル入力がバッファから読み取り可能な状態になった場合に発生します:
pub fn enableInterrupt(port: Ports) void {
var ie = am.inb(@intFromEnum(port) + offsets.ier);
ie |= @as(u8, 0b0000_0001); // Rx-available
ie &= ~@as(u8, 0b0000_0010); // ~Tx-available
am.outb(ie, @intFromEnum(port) + offsets.ier);
}
idefs は、interrupts.zig のインポートです:
const arch = @import("ymir").arch;
pub const user_intr_base = arch.intr.num_system_exceptions;
pub const pic_timer = 0 + user_intr_base;
...
pub const pic_serial1 = 4 + user_intr_base;
なお、IER の 1-th bit をクリアしているのは無限割り込みを防ぐためです。 Tx-empty は、シリアル出力しようとしたデータが実際に送信され、出力バッファに他のデータを書き込める状態になった時に発生します。 しかし、割り込みハンドラの中でさらにシリアルログ出力をしており、これがまた Tx-empty を発生させます。 永遠に TX-empty → シリアルログ出力 → TX-empty → ... というループが発生してしまうため、この割り込みは無効化しておきます。
これでシリアルの割り込みが有効化されました。 実際に実行してみましょう:
[INFO ] main | Booting Ymir...
[INFO ] main | Initialized GDT.
[INFO ] main | Initialized IDT.
[INFO ] main | Initialized page allocator.
[INFO ] main | Reconstructing memory mapping...
[INFO ] main | Initialized general allocator.
[INFO ] main | Initialized PIC.
[DEBUG] main | IRQ: 4
Initialized PIC という表示の後に適当なキーを押すと、IRQ: 4 という表示が出力されました。
しっかりとシリアルの割り込みが発生していることがわかります。
PIC の設定がちゃんとできていることの証拠ですね。
なお、enableInterrupt() で設定した IER ですが、Tx-empty の無効化はコードから消して、逆に有効化するようにしておいてください。
本シリーズでは Ymir が CPU を仮想化する際、シリアルへの操作はすべて仮想化します。
その際、IER は固定で Tx-empty と Rx-available だけを有効化しておくように仮想化し、ゲストには触らせないようにする予定です。
そのため、IER はあらかじめホストである Ymir が設定しておく必要があるというわけです:
ie |= @as(u8, 0b0000_0011); // Tx-empty, Rx-available
また、ついでに PIT もマスクだけ外しておきましょう:
arch.intr.registerHandler(idefs.pic_timer, blobIrqHandler);
arch.pic.unsetMask(.timer);
log.info("Enabled PIT.", .{});
PIT の設定はしていませんが、デフォルトの状態で(または UEFI が設定したおかげで)タイマーは動いているようです。
このまま実行すると IRQ: 0 という表示が一定間隔で出力され続けるはずです。
最後に、タイマーもシリアルも割り込みハンドラでログ出力をすると非常に鬱陶しいため log.debug() は削除しておいてください。
まとめ
本チャプターでは Intel 8259A PIC の初期化と割込みの有効化をしました。 タイマーとシリアルの割り込みマスクを外し、実際に割り込みハンドラが呼ばれることを確認しました。 Ymir では直接 IRQ をハンドルすることはありませんが、ゲストに対して PIC の一部を仮想化する上でもホスト側での PIC の設定は必要です。
そして! 本チャプターで Ymir Kernel 部分の実装は完了になります! Writing Hypervisor というタイトルなのにも関わらず、hypervisor にあまり関係ない部分が多くなってしまいました。 しかし、ベアメタルな hypervisor を書くということは、まずはベアメタルな OS を書くことから始まります。 今回までで OS という下地を作ることができたので、次回からはいよいよ hypervisor の章に入っていこうと思います。 今日は温かくして早めに寝てください。
References
- 8259A PROGRAMMABLE INTERRUPT CONTROLLER (8259A/8259A-2) - Intel
- 8259 PIC - OSDev Wiki
- パソコンのレガシィI/O活用大全 - 桑野 雅彦
実際には、CPU が割り込みを受理して \( \overline{INTA} \) 信号を送信し ISR がセットされたあと、CPU は追加で \( \overline{INTA} \) 信号を送信してきます。 これにより、PIC は処理対象にした割り込みのベクタ番号を Data Bus Buffer と呼ばれるバッファにセットします。 Auto-EOI が有効な場合、この時点で ISR がクリアされます。
Command Words は命令というよりレジスタと解釈してもいいかもしれません。 ただし通常の I/O mapped register とは異なり、同じI/Oポートに書き込んでも状況によってどの CW に書き込むかどうかが変わることに注意してください。
Command Port 経由で送信すると \( A_0 \) が 0 に、Data Port 経由で送信すると 1 になるようです。